NEWS CENTER
ж–°й—»дёӯеҝғ
жүӢ жңәпјҡ+86 13823531619
йӮ® з®ұпјҡxhautomatic@foxmail.com
з”ө иҜқпјҡ+86 0769-82222336
зҪ‘ еқҖпјҡwww.xhautomatic.com
ең° еқҖпјҡдёңиҺһеёӮеҜ®жӯҘй•ҮжІҝжІіеҢ—и·Ҝ7еҸ·жқҫж№–жҷәи°·дә§дёҡеӣӯD2ж Ӣ4жҘј
дёҖгҖҒеј•иЁҖ
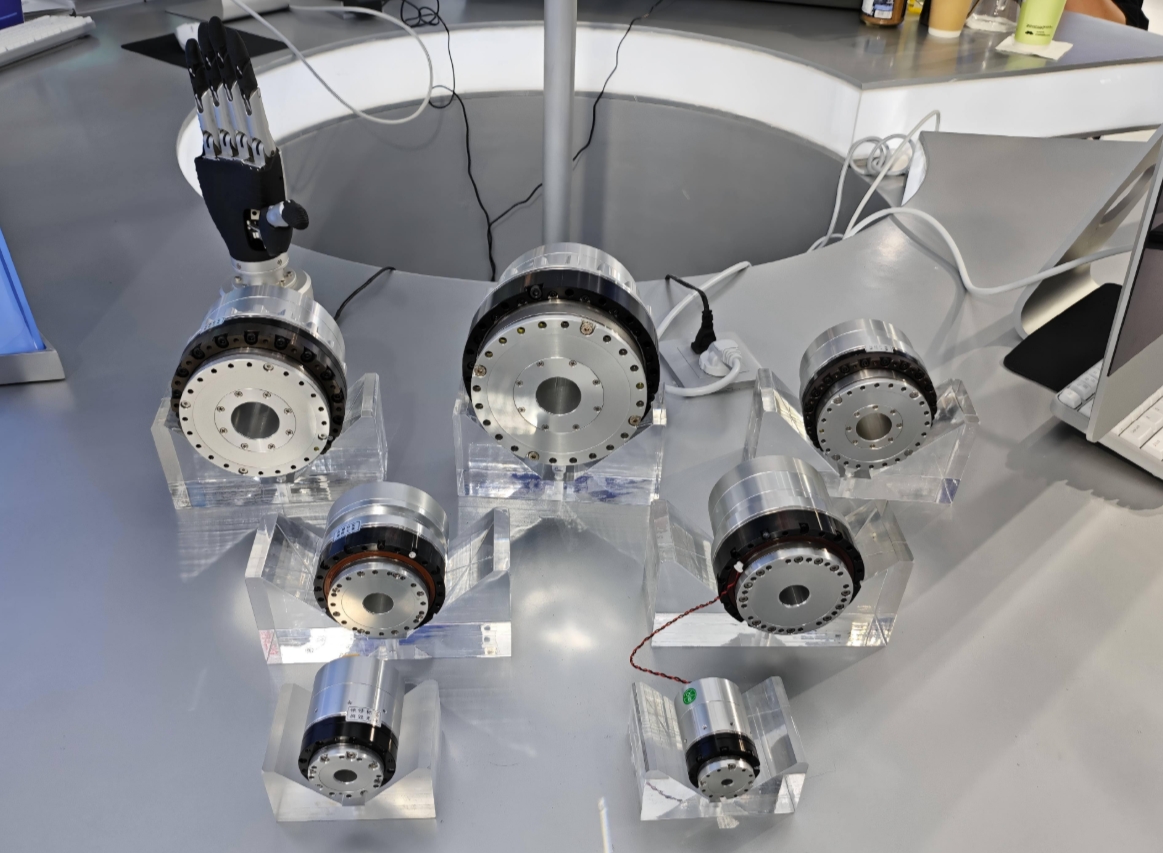
йҡҸзқҖдәәе·ҘжҷәиғҪгҖҒжқҗж–ҷ科еӯҰе’ҢзІҫеҜҶеҲ¶йҖ жҠҖжңҜзҡ„еҝ«йҖҹеҸ‘еұ•пјҢдәәеҪўжңәеҷЁдәәжӯЈйҖҗжёҗд»Һе®һйӘҢе®Өиө°еҗ‘зҺ°е®һеә”з”ЁгҖӮе…¶ж ёеҝғз»„жҲҗйғЁеҲҶвҖ”вҖ”й©ұеҠЁз”өжңәпјҢзӣҙжҺҘеҶіе®ҡдәҶжңәеҷЁдәәзҡ„иҝҗеҠЁжҖ§иғҪгҖҒиғҪиҖ—ж°ҙе№іе’ҢеҠЁжҖҒе“Қеә”иғҪеҠӣгҖӮж №жҚ®й©ұеҠЁж–№ејҸзҡ„дёҚеҗҢпјҢжңәеҷЁдәәй©ұеҠЁзі»з»ҹеҸҜеҲҶдёәж¶ІеҺӢй©ұеҠЁгҖҒж°”дҪ“й©ұеҠЁе’Ңз”өжңәй©ұеҠЁдёүеӨ§зұ»гҖӮе…¶дёӯпјҢз”өжңәй©ұеҠЁеӣ е…·жңүй«ҳзІҫеәҰгҖҒй«ҷж•ҲзҺҮгҖҒжҳ“жҺ§еҲ¶зӯүдјҳеҠҝпјҢжҲҗдёәдәәеҪўжңәеҷЁдәәзҡ„дё»жөҒй©ұеҠЁж–№ејҸгҖӮ
дәҢгҖҒжңәеҷЁдәәй©ұеҠЁж–№ејҸжҰӮиҝ°
1. ж¶ІеҺӢй©ұеҠЁпјҡд»Ҙж¶ІдҪ“пјҲеҰӮж¶ІеҺӢжІ№пјүдёәе·ҘдҪңд»ӢиҙЁпјҢйҖҡиҝҮж¶ІеҺӢжіөе’ҢйҳҖжҺ§зі»з»ҹе®һзҺ°еҠЁеҠӣдј йҖ’гҖӮе…¶дјҳзӮ№жҳҜиҫ“еҮәжүӯзҹ©еӨ§гҖҒе“Қеә”йҖҹеәҰеҝ«пјҢйҖӮз”ЁдәҺеӨ§еһӢйҮҚиҪҪжңәеҷЁдәәпјҲеҰӮе·Ҙдёҡжҗ¬иҝҗжңәеҷЁдәәпјүпјҢдҪҶеӯҳеңЁзі»з»ҹеӨҚжқӮгҖҒжҳ“жі„жјҸгҖҒз»ҙжҠӨжҲҗжң¬й«ҳзӯүй—®йўҳгҖӮ
2. ж°”дҪ“й©ұеҠЁпјҡдҫқиө–еҺӢзј©з©әж°”дә§з”ҹеҠЁеҠӣпјҢе…·жңүжё…жҙҒгҖҒйҳІзҲҶзӯүдјҳзӮ№пјҢеёёз”ЁдәҺеҢ»з–—иҫ…еҠ©жңәеҷЁдәәзӯүеҜ№йҳІжҠӨжҖ§иҰҒжұӮиҫғй«ҳзҡ„еңәжҷҜпјҢдҪҶеҠҹзҺҮеҜҶеәҰиҫғдҪҺпјҢжҺ§еҲ¶зІҫеәҰжңүйҷҗгҖӮ
3. з”өжңәй©ұеҠЁпјҡйҖҡиҝҮз”өиғҪиҪ¬еҢ–дёәжңәжў°иғҪпјҢе…·жңүжҺ§еҲ¶зІҫеәҰй«ҳгҖҒеҠЁжҖҒе“Қеә”еҝ«гҖҒиғҪж•ҲжҜ”дјҳзӯүзү№зӮ№пјҢжҳҜзӣ®еүҚдәәеҪўжңәеҷЁдәәйўҶеҹҹеә”з”ЁжһҒдёәе№ҝжіӣзҡ„й©ұеҠЁж–№ејҸгҖӮдёӢж–Үе°ҶйҮҚзӮ№еӣҙз»•з”өжңәй©ұеҠЁзҡ„з»ҶеҲҶзұ»еһӢеұ•ејҖи®Ёи®әгҖӮ
дёүгҖҒдәәеһӢжңәеҷЁдәәй©ұеҠЁз”өжңәеҲҶзұ»дёҺеҠҹиғҪзү№зӮ№
1. дјәжңҚз”өжңә
вҖў жҠҖжңҜд»Ӣз»Қпјҡ
вҖў дјәжңҚз”өжңәжҳҜдёҖз§Қй—ӯзҺҜжҺ§еҲ¶з”өжңәпјҢйҖҡиҝҮеҶ…зҪ®зј–з ҒеҷЁе®һж—¶еҸҚйҰҲдҪҚзҪ®гҖҒйҖҹеәҰжҲ–еҠӣзҹ©дҝЎеҸ·пјҢ并дёҺжҺ§еҲ¶еҷЁеҪўжҲҗй—ӯзҺҜи°ғиҠӮзі»з»ҹгҖӮзӣ®еүҚдё»жөҒдјәжңҚз”өжңәйҮҮз”Ёж°ёзЈҒеҗҢжӯҘз”өжңәпјҲPMSMпјүжҠҖжңҜпјҢз»“еҗҲй«ҳзІҫеәҰдј ж„ҹеҷЁпјҲеҰӮе…үеӯҰзј–з ҒеҷЁпјүе’Ңе…ҲиҝӣжҺ§еҲ¶з®—жі•пјҲеҰӮFOCзҹўйҮҸжҺ§еҲ¶пјүпјҢе®һзҺ°еҫ®зұізә§е®ҡдҪҚзІҫеәҰгҖӮ
вҖў еҠҹиғҪзү№зӮ№пјҡ
вҖў й«ҳзІҫеәҰпјҡдҪҚзҪ®иҜҜе·®еҸҜжҺ§еҲ¶еңЁВұ0.01В°д»ҘеҶ…пјҢйҮҚеӨҚе®ҡдҪҚзІҫеәҰиҫҫеҫ®зұізә§гҖӮ
вҖў еҠЁжҖҒе“Қеә”еҝ«пјҡе“Қеә”ж—¶й—ҙдҪҺдәҺ1 msпјҢеҠ йҖҹеәҰеҸҜиҫҫ10,000 rad/sВІгҖӮ
вҖў иҝҮиҪҪиғҪеҠӣејәпјҡзҹӯж—¶иҝҮиҪҪиғҪеҠӣеҸҜиҫҫйўқе®ҡжүӯзҹ©зҡ„3-5еҖҚгҖӮ
вҖў йҖӮй…ҚеңәжҷҜпјҡ
вҖў дё»иҰҒз”ЁдәҺдәәеҪўжңәеҷЁдәәзҡ„еӨ§е…іиҠӮй©ұеҠЁпјҢеҰӮиӮ©е…іиҠӮгҖҒиӮҳе…іиҠӮе’ҢиҶқе…іиҠӮгҖӮиҝҷдәӣйғЁдҪҚйңҖжүҝеҸ—иҫғеӨ§иҙҹиҪҪдё”йңҖй«ҳйў‘ж¬Ўй«ҳзІҫеәҰиҝҗеҠЁпјҢдјәжңҚз”өжңәеҸҜйҖҡиҝҮй«ҳеҲҡеәҰдј еҠЁй“ҫпјҲеҰӮи°җжіўеҮҸйҖҹеҷЁпјүе®һзҺ°зІҫеҮҶеҠӣжҺ§дёҺиҪЁиҝ№и·ҹиёӘгҖӮ
вҖў ж–°иҝӣеұ•пјҲжҲӘиҮі2025е№ҙ9жңҲ15ж—Ҙпјүпјҡ
ж–°дёҖд»ЈдјәжңҚз”өжңәйҮҮз”ЁеӨҡзҺҜеҚҸеҗҢжҺ§еҲ¶жҠҖжңҜпјҲдҪҚзҪ®-йҖҹеәҰ-еҠӣзҹ©дёүзҺҜй—ӯзҺҜпјүпјҢ并йӣҶжҲҗжё©еәҰиЎҘеҒҝз®—жі•пјҢи§ЈеҶій•ҝж—¶й—ҙиҝҗиЎҢж—¶зҡ„зғӯжјӮ移问йўҳгҖӮжӯӨеӨ–пјҢйғЁеҲҶй«ҳз«ҜжңәеһӢйҮҮз”ЁзўізәӨз»ҙз»•з»„жҠҖжңҜпјҢе°ҶеҠҹзҺҮеҜҶеәҰжҸҗеҚҮиҮі5 kW/kgд»ҘдёҠгҖӮ
вҖў жҠҖжңҜд»Ӣз»Қпјҡ
вҖў з©әеҝғжқҜз”өжңәеұһдәҺеҫ®еһӢзӣҙжөҒдјәжңҚз”өжңәпјҢе…¶иҪ¬еӯҗйҮҮз”Ёж— й“ҒиҠҜи®ҫи®ЎпјҲйҖҡеёёдёәз©әеҝғжқҜзҠ¶з»•з»„пјүпјҢж¶ҲжҺүдәҶдј з»ҹй“ҒиҠҜж¶ЎжөҒжҚҹиҖ—пјҢ并йҮҮз”Ёй’•й“ҒзЎјзЈҒй’ўе®һзҺ°й«ҳзЈҒиғҪз§ҜгҖӮ
вҖў еҠҹиғҪзү№зӮ№пјҡ
вҖў й«ҷж•ҲиҠӮиғҪпјҡж•ҲзҺҮеҸҜиҫҫ85%д»ҘдёҠпјҢиҝңи¶…дј з»ҹжңүеҲ·з”өжңәпјҲ60%-70%пјүгҖӮ
вҖў иҪ»йҮҸеҢ–пјҡеҠҹзҺҮеҜҶеәҰеҸҜиҫҫ1.5 kW/kgпјҢйҮҚйҮҸиҫғеҗҢеҠҹзҺҮж ҮеҮҶз”өжңәеҮҸиҪ»50%гҖӮ
вҖў дҪҺжғҜжҖ§пјҡиҪ¬еӯҗжғҜжҖ§жһҒдҪҺпјҢеҗҜеҒңе“Қеә”ж—¶й—ҙдҪҺдәҺ10 msгҖӮ
вҖў йҖӮй…ҚеңәжҷҜпјҡ
вҖў дё»иҰҒз”ЁдәҺдәәеҪўжңәеҷЁдәәзҡ„жң«з«Ҝжү§иЎҢеҷЁпјҢеҰӮзҒөе·§жүӢжҢҮе…іиҠӮгҖӮиҝҷдәӣйғЁдҪҚйңҖеңЁжңүйҷҗз©әй—ҙеҶ…е®һзҺ°зІҫз»Ҷж“ҚдҪңпјҲеҰӮжҠ“еҸ–гҖҒжҚҸеҗҲпјүпјҢ并иҰҒжұӮдҪҺжҢҜеҠЁгҖҒдҪҺеҷӘеЈ°иҝҗиЎҢгҖӮ
вҖў ж–°иҝӣеұ•пјҡ
вҖў 2025е№ҙеҸ‘еёғзҡ„第дёүд»Јз©әеҝғжқҜз”өжңәйҮҮз”ЁеҚ°еҲ·з”өи·ҜжқҝпјҲPCBпјүе®ҡеӯҗжҠҖжңҜпјҢиҝӣдёҖжӯҘзј©еҮҸиҪҙеҗ‘е°әеҜёпјҢеҗҢж—¶ж”ҜжҢҒеі°еҖјжүӯзҹ©зҹӯж—¶еҖҚеўһжЁЎејҸпјҲжҢҒз»ӯ0.1-0.5 sпјүпјҢж»Ўи¶ізӘҒеҸ‘иҙҹиҪҪйңҖжұӮгҖӮ
3. жӯҘиҝӣз”өжңә
вҖў жҠҖжңҜд»Ӣз»Қпјҡ
вҖў жӯҘиҝӣз”өжңәжҳҜдёҖз§ҚејҖзҺҜжҺ§еҲ¶з”өжңәпјҢйҖҡиҝҮжҺҘ收и„үеҶІдҝЎеҸ·й©ұеҠЁиҪ¬еӯҗеҲҶж®өж—ӢиҪ¬пјҲжҜҸи„үеҶІеҜ№еә”еӣәе®ҡи§’еәҰпјүгҖӮж··еҗҲејҸжӯҘиҝӣз”өжңәпјҲз»“еҗҲж°ёзЈҒе’ҢеҸҜеҸҳзЈҒйҳ»зү№жҖ§пјүжҲҗдёәдё»жөҒпјҢз»ҶеҲҶй©ұеҠЁжҠҖжңҜеҸҜе®һзҺ°еҫ®жӯҘжҺ§еҲ¶пјҲжһҒй«ҳеҸҜиҫҫ51200жӯҘ/иҪ¬пјүгҖӮ
вҖў еҠҹиғҪзү№зӮ№пјҡ
вҖў з»“жһ„з®ҖеҚ•пјҡж— йңҖзј–з ҒеҷЁеҚіеҸҜе®һзҺ°дҪҚзҪ®жҺ§еҲ¶пјҢжҲҗжң¬иҫғдҪҺгҖӮ
вҖў дҪҺйҖҹй«ҳжүӯзҹ©пјҡеңЁдҪҺйҖҹиҢғеӣҙеҶ…дҝқжҢҒжҒ’е®ҡжүӯзҹ©иҫ“еҮәгҖӮ
вҖў еҸҜйқ жҖ§й«ҳпјҡж— з”өеҲ·зЈЁжҚҹпјҢеҜҝе‘Ҫй•ҝиҫҫ10дёҮе°Ҹж—¶гҖӮ
вҖў йҖӮй…ҚеңәжҷҜпјҡ
вҖў йҖӮз”ЁдәҺеҜ№зІҫеәҰиҰҒжұӮйҖӮдёӯгҖҒиҝҗеҠЁйў‘зҺҮиҫғдҪҺзҡ„йғЁдҪҚпјҢеҰӮдәәеҪўжңәеҷЁдәәзҡ„и…°йғЁж—ӢиҪ¬е…іиҠӮе’ҢйўҲйғЁдҝҜд»°е…іиҠӮгҖӮиҝҷдәӣйғЁдҪҚиҝҗеҠЁйҖҹеәҰдҪҺдё”йңҖдҝқжҢҒйқҷжҖҒиҮӘй”ҒпјҲеҰӮеӨҙйғЁе§ҝжҖҒз»ҙжҢҒпјүгҖӮ
вҖў жҠҖжңҜеұҖйҷҗдёҺж”№иҝӣпјҡ
вҖў дј з»ҹжӯҘиҝӣз”өжңәеӯҳеңЁжҢҜеҠЁеҷӘеЈ°еӨ§гҖҒй«ҳйҖҹеӨұжӯҘзӯүй—®йўҳгҖӮ2024е№ҙеҗҺжҺЁеҮәзҡ„ж–°еһӢжӯҘиҝӣз”өжңәйҮҮз”Ёй—ӯзҺҜзј–з ҒеҷЁеҸҚйҰҲпјҲдјӘдјәжңҚжЁЎејҸпјүпјҢе°Ҷе®ҡдҪҚзІҫеәҰжҸҗеҚҮиҮіВұ0.05В°пјҢеҗҢж—¶йҖҡиҝҮи°җжҢҜжҠ‘еҲ¶з®—жі•йҷҚдҪҺжҢҜеҠЁгҖӮ
вҖў жҠҖжңҜд»Ӣз»Қпјҡ
ж— жЎҶеҠӣзҹ©з”өжңәзңҒеҺ»дәҶдј з»ҹз”өжңәзҡ„еӨ–еЈігҖҒиҪҙжүҝе’Ңиҫ“еҮәиҪҙпјҢд»…дҝқз•ҷе®ҡеӯҗдёҺиҪ¬еӯҗ组件пјҢеҸҜзӣҙжҺҘеөҢе…Ҙе…іиҠӮеҶ…йғЁдёҺеҮҸйҖҹеҷЁйӣҶжҲҗгҖӮе…¶е·ҘдҪңеҺҹзҗҶзұ»дјјзӣҙжҺҘй©ұеҠЁз”өжңәпјҲDD MotorпјүпјҢдҪҶжүӯзҹ©еҜҶеәҰжӣҙй«ҳгҖӮ
вҖў еҠҹиғҪзү№зӮ№пјҡ
вҖў й«ҳйӣҶжҲҗеәҰпјҡдёҺе…іиҠӮз»“жһ„дёҖдҪ“еҢ–и®ҫи®ЎпјҢз©әй—ҙеҲ©з”ЁзҺҮжҸҗеҚҮ40%д»ҘдёҠгҖӮ
вҖў йӣ¶иғҢйҡҷдј еҠЁпјҡж— йңҖдј еҠЁй“ҫпјҢйҒҝе…ҚйҪҝиҪ®е•®еҗҲиҜҜе·®гҖӮ
вҖў й«ҳжүӯзҹ©еҜҶеәҰпјҡеі°еҖјжүӯзҹ©еҸҜиҫҫ500 Nmд»ҘдёҠпјҢжүӯзҹ©еҜҶеәҰиҫҫ15 Nm/kgгҖӮ
вҖў йҖӮй…ҚеңәжҷҜпјҡ
вҖў дё»иҰҒз”ЁдәҺй«ҳжүӯзҹ©дё”з©әй—ҙеҸ—йҷҗзҡ„е…іиҠӮпјҢеҰӮй«Ӣе…іиҠӮгҖҒиҶқе…іиҠӮе’ҢиӮ©е…іиҠӮгҖӮиҝҷдәӣйғЁдҪҚйңҖеңЁзҙ§еҮ‘з©әй—ҙеҶ…иҫ“еҮәеӨ§жүӯзҹ©пјҢ并ж”ҜжҢҒзҲҶеҸ‘жҖ§иҝҗеҠЁпјҲеҰӮи·іи·ғгҖҒж”ҖзҲ¬пјүгҖӮ
вҖў ж–°иҝӣеұ•пјҡ
вҖў 2025е№ҙиЎҢдёҡејҖе§ӢжҺЁе№ҝж¶ІеҶ·ејҸж— жЎҶз”өжңәпјҢйҖҡиҝҮеҶ…зҪ®еҫ®еһӢжөҒйҒ“е°Ҷж•Јзғӯж•ҲзҺҮжҸҗеҚҮ200%пјҢи§ЈеҶій«ҳйҖҹжҢҒз»ӯиҝҗиЎҢж—¶зҡ„иҝҮзғӯй—®йўҳгҖӮеҗҢж—¶пјҢйҮҮз”ЁеҲҶж®өз»•з»„и®ҫи®Ўе®һзҺ°ж•…йҡңе®№й”ҷпјҲеҚ•зӣёеӨұж•Ҳд»ҚеҸҜйҷҚйўқиҝҗиЎҢпјүгҖӮ
вҖў жҠҖжңҜд»Ӣз»Қпјҡ
вҖў иҪҙеҗ‘зЈҒйҖҡз”өжңәпјҲAFPMпјүзҡ„зЈҒйҖҡж–№еҗ‘дёҺз”өжңәиҪҙе№іиЎҢпјҢе®ҡеӯҗе’ҢиҪ¬еӯҗе‘ҲеҸҢзӣҳжҲ–еӨҡзӣҳеҜ№еҗ‘жҺ’еҲ—гҖӮе…¶ж°”йҡҷзЈҒеңәдёәиҪҙеҗ‘еҲҶеёғпјҢдёҺдј з»ҹеҫ„еҗ‘зЈҒйҖҡз”өжңәзӣёжҜ”пјҢзј©зҹӯдәҶзЈҒи·Ҝй•ҝеәҰпјҢйҷҚдҪҺдәҶзЈҒйҳ»жҚҹиҖ—гҖӮ
вҖў еҠҹиғҪзү№зӮ№пјҡ
вҖў и¶…й«ҳеҠҹзҺҮеҜҶеәҰпјҡеҠҹзҺҮеҜҶеәҰеҸҜиҫҫ10 kW/kgпјҢиҫғдјәжңҚз”өжңәжҸҗй«ҳ3еҖҚд»ҘдёҠгҖӮ
вҖў жүҒе№іеҢ–з»“жһ„пјҡиҪҙеҗ‘е°әеҜёеҮҸе°‘50%пјҢжӣҙйҖӮеҗҲе…іиҠӮеҶ…зҪ®гҖӮ
вҖў й«ҷж•ҲзҺҮеҢәй—ҙе®ҪпјҡеңЁ20%-95%иҙҹиҪҪиҢғеӣҙеҶ…ж•ҲзҺҮеӨ§дәҺ90%гҖӮ
вҖў йҖӮй…ҚеңәжҷҜпјҡ
вҖў йҖӮз”ЁдәҺеҜ№йҮҚйҮҸе’Ңз©әй—ҙжһҒеәҰж•Ҹж„ҹзҡ„й«ҳжүӯзҹ©йғЁдҪҚпјҢеҰӮи…ҝйғЁе…іиҠӮпјҲй«ӢгҖҒиҶқгҖҒиёқпјүе’ҢиӮ©йғЁеӨҚеҗҲе…іиҠӮгҖӮиҝҷдәӣйғЁдҪҚйңҖйў‘з№ҒеҗҜеҒңдё”жүҝеҸ—еҶІеҮ»иҙҹиҪҪпјҢиҪҙеҗ‘зЈҒйҖҡз”өжңәзҡ„й«ҳеҠЁжҖҒзү№жҖ§еҸҜжҳҫи‘—жҸҗеҚҮиҝҗеҠЁжҖ§иғҪгҖӮ
вҖўжҠҖжңҜжҢ‘жҲҳдёҺиҝӣеұ•пјҡ
вҖў жҲӘиҮі2025е№ҙ9жңҲ15ж—ҘпјҢиҪҙеҗ‘зЈҒйҖҡз”өжңәзҡ„жҲҗжң¬д»Қй«ҳдәҺдј з»ҹз”өжңәпјҲзәҰ2-3еҖҚпјүпјҢдё»иҰҒеӣ ж°ёзЈҒдҪ“з”ЁйҮҸеӨ§дё”еҲ¶йҖ е·ҘиүәеӨҚжқӮпјҲйңҖеҲҶж®өж–ңжһҒжҠҖжңҜпјүгҖӮжӯӨеӨ–пјҢж•ЈзғӯйңҖдҫқиө–йҷ¶з“·еҹәжқҝеҜјзғӯжҲ–жІ№еҶ·ж–№жЎҲгҖӮзӣ®еүҚиҜҘжҠҖжңҜе·ІеңЁж–°дёҖд»ЈдәәеҪўжңәеҷЁдәәи…ҝйғЁй©ұеҠЁдёӯиҜ•зӮ№еә”з”ЁпјҢйў„и®Ў2026е№ҙеҗҺйҡҸдҫӣеә”й“ҫжҲҗзҶҹйҖҗжӯҘйҷҚжң¬гҖӮ
еӣӣгҖҒйҖӮй…ҚеңәжҷҜз»јеҗҲеҜ№жҜ”дёҺйҖүеһӢеҺҹеҲҷ
вҖў дәәеҪўжңәеҷЁдәәй©ұеҠЁз”өжңәйҖүеһӢйңҖз»јеҗҲиҖғйҮҸд»ҘдёӢеӣ зҙ пјҡ
1. иҙҹиҪҪзү№жҖ§пјҡеӨ§жғҜжҖ§иҙҹиҪҪе…іиҠӮпјҲеҰӮй«ӢйғЁпјүдјҳе…ҲйҖүжӢ©ж— жЎҶеҠӣзҹ©з”өжңәжҲ–иҪҙеҗ‘зЈҒйҖҡз”өжңәпјӣзІҫз»Ҷж“ҚдҪңйғЁдҪҚпјҲеҰӮжүӢжҢҮпјүйҖүз”Ёз©әеҝғжқҜз”өжңәгҖӮ
2. еҠЁжҖҒе“Қеә”пјҡй«ҳйҖҹиҝҗеҠЁе…іиҠӮпјҲеҰӮиӮҳйғЁпјүйңҖйҮҮз”Ёй«ҳе“Қеә”дјәжңҚз”өжңәпјӣдҪҺйҖҹе…іиҠӮпјҲеҰӮйўҲйғЁпјүеҸҜйҖүз”ЁжӯҘиҝӣз”өжңәгҖӮ
3. з©әй—ҙзәҰжқҹпјҡзҙ§еҮ‘еһӢе…іиҠӮпјҲеҰӮиёқйғЁпјүйҖӮз”ЁиҪҙеҗ‘зЈҒйҖҡз”өжңәжҲ–ж— жЎҶз”өжңәпјӣйқһеҸ—йҷҗз©әй—ҙеҸҜйҖүз”Ёж ҮеҮҶдјәжңҚз”өжңәгҖӮ
4. иғҪж•ҲиҰҒжұӮпјҡй«ҳиҝҗеҠЁйў‘зҺҮйғЁдҪҚпјҲеҰӮиҶқе…іиҠӮпјүйңҖйҖүжӢ©й«ҷж•Ҳз”өжңәпјҲеҰӮз©әеҝғжқҜжҲ–иҪҙеҗ‘зЈҒйҖҡз”өжңәпјүд»ҘйҷҚдҪҺзғӯжҚҹиҖ—гҖӮ
дә”гҖҒжңӘжқҘеҸ‘еұ•и¶ӢеҠҝ
1. ж··еҗҲй©ұеҠЁж–№жЎҲпјҡеҚ•е…іиҠӮиһҚеҗҲеӨҡз§Қз”өжңәпјҲеҰӮдјәжңҚз”өжңә+з©әеҝғжқҜз”өжңәпјүе®һзҺ°й«ҳдҪҺйҖҹеҚҸеҗҢжҺ§еҲ¶гҖӮ
2. жқҗж–ҷеҲӣж–°пјҡйқһзЁҖеңҹж°ёзЈҒжқҗж–ҷпјҲеҰӮй“Ғж°®ж°ёзЈҒпјүе’Ңзўізәізұіз®Ўз»•з»„жҠҖжңҜжңүжңӣиҝӣдёҖжӯҘеҮҸиҪ»йҮҚйҮҸгҖҒйҷҚдҪҺжҲҗжң¬гҖӮ
3. зғӯз®ЎзҗҶйқ©е‘ҪпјҡзӣёеҸҳжқҗж–ҷпјҲPCMпјүж•Јзғӯе’Ңеҫ®жөҒйҒ“ж¶ІеҶ·жҠҖжңҜе°ҶжҲҗдёәй«ҳеҠҹзҺҮеҜҶеәҰз”өжңәзҡ„ж ҮеҮҶй…ҚзҪ®гҖӮ
4. жҷәиғҪеҢ–йӣҶжҲҗпјҡз”өжңәжң¬дҪ“йӣҶжҲҗжҢҜеҠЁдј ж„ҹеҷЁгҖҒжё©еәҰдј ж„ҹеҷЁеҸҠиҮӘиҜҠж–ӯз®—жі•пјҢе®һзҺ°йў„жөӢжҖ§з»ҙжҠӨгҖӮ